新聞動態(tài)
介紹低速環(huán)鏈電動葫蘆高度檢測及群吊同步系統(tǒng)
編輯:凌鷹起重機械
瀏覽:880
添加時間:2022-10-28 09:27:18
?
低速環(huán)鏈電動葫蘆又稱低速環(huán)鏈電動提升機����,主要應(yīng)用在附著式升降作業(yè)安全防護平臺����、船體��、儲罐等大型結(jié)構(gòu)件的起吊作業(yè)中��,一般為幾個乃至數(shù)十個群吊使用���。傳統(tǒng)的低速環(huán)鏈電動葫蘆沒有高度檢測裝置,在其群吊過程中����,由外部重量傳感器和控制箱通過控制各個低速環(huán)鏈電動葫蘆的重量差來避免位移差過大,或者通過外部鏈輪鏈條機構(gòu)實現(xiàn)起升速度測定��。
目前��,環(huán)鏈電動葫蘆基本上不進行高度檢測��。通用的是僅有極限限位����,采用的是機械按壓的限位開關(guān),即在鏈條的首末端安裝一個彈簧或其他彈性材料����,在環(huán)鏈電動葫蘆本體上安裝兩個行程開關(guān)或微動開關(guān)(一個控制上限位,一個控制下限位)。當(dāng)鏈條運行過程中�,鏈條首端或末端的彈簧撞到限位開關(guān),即觸發(fā)限位功能�。
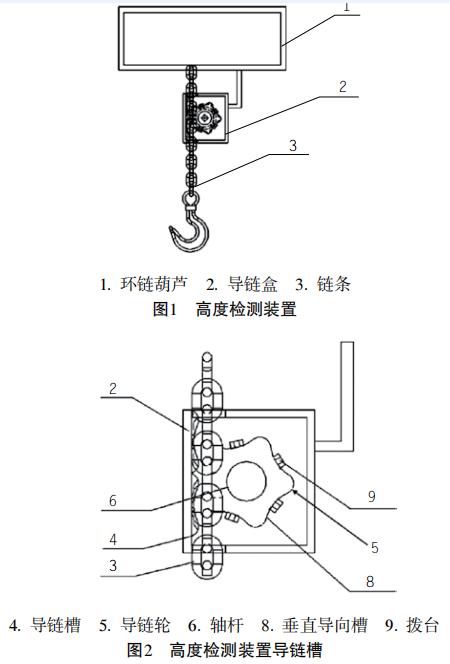
外掛高度檢測裝置:也有一些研究,如圖1和圖2所示���,環(huán)鏈葫蘆的殼體下方布置一個導(dǎo)鏈盒�,導(dǎo)鏈盒內(nèi)布置導(dǎo)鏈輪���,與鏈條嚙合����,導(dǎo)鏈輪的轉(zhuǎn)動帶動凸輪限位器工作�,從而實現(xiàn)高度測定。這種測速方式使得葫蘆的有效起升高度降低�,并且導(dǎo)鏈盒需要有葫蘆殼體剛性連接�����,不然影響鏈條和導(dǎo)鏈輪的嚙合�����,造成檢測精度下降。導(dǎo)鏈盒的存在又使得葫蘆垂直方向體積變大�����,增加了包裝�、運輸?shù)碾y度。
重量同步控制系統(tǒng):也有一些同步是通過重量差來實現(xiàn)的���,例如CECS 373:2014《附著式升降腳手架升降及同步控制系統(tǒng)應(yīng)用技術(shù)規(guī)程》規(guī)定����,每個低速環(huán)鏈電動葫蘆配備一個載荷傳感器和單控箱��,一個總控箱控制若干個單控箱����,如圖3所示。當(dāng)兩個傳感器載荷差超過±15%時發(fā)出報警����,當(dāng)兩個傳感器載荷差超過±30%時停機。
通過重量來實現(xiàn)同步�,在實際使用中可以避免一個葫蘆快一個葫蘆慢,從而避免起升過快或過慢的葫蘆受力過大造成事故��。但是從理論上來講,同步指的是位移同步��,和受力沒有關(guān)系�����,所以用受力差來實現(xiàn)同步不能代替位移同步����,仍需要高度檢測裝置。
?
?
上一條:框架式支架搬運車在煤礦井中的應(yīng)用
下一條:低速環(huán)鏈電動葫蘆內(nèi)置式高度檢測裝置的優(yōu)點
相關(guān)新聞:
相關(guān)產(chǎn)品: